Протокол AX.25 в Linux Slackware
UA6HJQнаписано для aprs-kawkaz в марте 2012
Для полноценной работы AX.25 в Linux, нужно чтобы ядро было собрано с поддержкой протокола AX.25 (в slackware стандартное ядро bare.i уже имеет поддержку) и нужно установить пакеты: ax25_apps, ax25_tools и libax25, они позволяют создать очень гибкую пакетныю систему и работают с большим кол-вом различного 'железа', от звуковых и DSP-карт, до многопортовых TNC. На схеме ниже вы видите одну из возможных конфигураций, которая позволяет работать APRS, Packet Radio, AMPR, FlexNet, NETROM, INP3, WEBHAM. У меня она сделана на основе старого LapTop CPU 233мГц, RAM 64Мб, HDD 2GGb и Linux Slackware 11. Двухпортовые контроллеры подключены к портам COM1 и COM2.
Пакеты ax25_apps, ax25_tools и libax25 можно взять из комплекта Salckware или скомпилировать самому более новые версии взяв их на сайте linux-ax25.org. Сначала рассмотрим самую простейшую конфигурацию, с одним портом и TNC2. После установки утилит потребуется создать запускающий скрипт и отредактировать некоторые конфигурационные файлы.
# /etc/ax25/axports # #name callsign speed paclen window description p1 UA6HJQ-1 9600 255 3 TNC2 (6pack)Порт имеет имя p1 (можно придумать другое), к нему подключен TNC2 с прошивкой 6pack. Скорость между TNC2 и СОМ-портом 9600бод, скорость в радиоканале (у моего TNC2W) 1200бод. Теперь создаём файл rc.ax25, который будет запускать нашу AX.25 конфигурацию с нужными параметрами и дополнительные программы.
#!/bin/sh # /etc/rc.d/rc.ax25 # # load modules insmod ax25 insmod 6pack # # port 1: tnc2 on 6pack mode via COM1 kissattach -6 /dev/ttyS0 p1 44.178.92.100 sleep 1 # echo "ax.25 parameters for tnc2" # -p port, -r persystanse, -l txtail, -s slottime, -t txdelay kissparms -p p1 -r 60 -s 100 -t 330 sleep 1 # echo "listen (monitor) on tty10" listen -ari8ct > /dev/tty10 & sleep 1 # echo "start mheardd" mheardd -n 20 sleep 1 # echo "start AX.25 beacons" beacon -d WSEM -s p1 "AX.25 utils is runing..." beacon -c UA6HJQ -d CQ -t 20 p1 "My home packet radio system on Linux Slackware" & #Что мы получили? К порту COM1 подключен TNC2 с прошивкой 6PACK (на мой взгляд, удачная прошивка) к TNC2 подключена УКВ радиостанция Yaesu FT-60R и антенна.
В файле запуска есть два маяка, первый передаётся один раз, только в момент запуска AX.25 системы. Второй маяк, каждые 20 минут, передаёт в эфир указанный текст. В 10-ом терминале (Alt+F10), мы можем наблюдать все переданные маяки и принимаемые из эфира пакеты от других станций. Смотрите вид экрана фото1.
{kind=link}
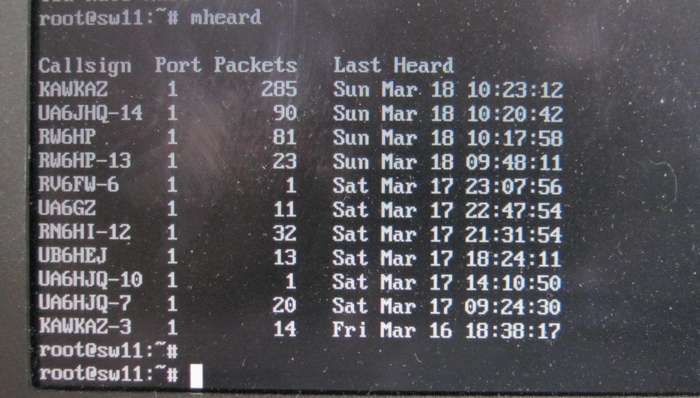
Запуск mheardd нужен для того чтобы можно было смотреть статистику по всем работающим AX.25 портам, командой mheard. Вот как это выглядит на экране: фото2.
{kind=link}
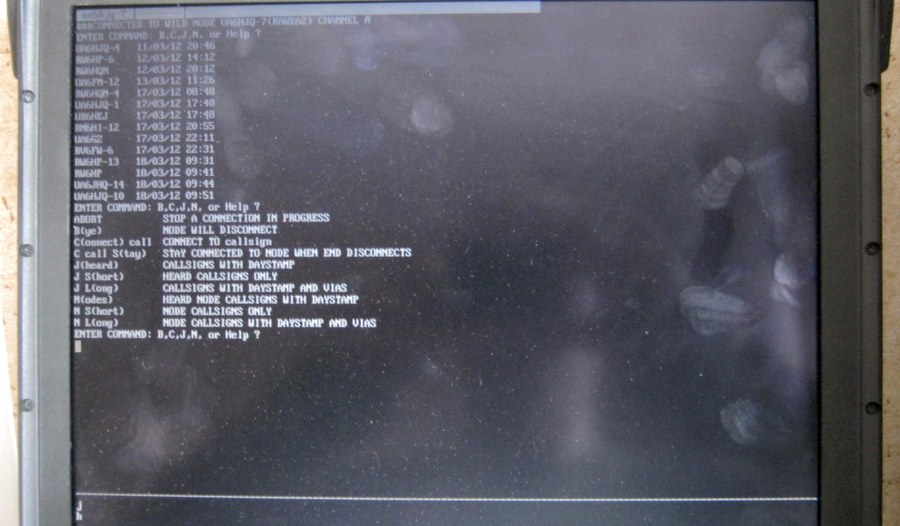
Командой kissparms мы установили несколько важных (именно для передачи пакетов) параметров. Теперь, чтобы соединиться с другой пакетной станцией (например с rz6hxa-8), нужно набрать в консоли команду call p1 rz6hxa-8. Цифра 1 это имя порта, оно может быть и другим. Сеанс связи выглядит так: фото3.
{kind=link}
Итак, у нас есть базовая конфигурация, которая будет основой для создания более сложных систем на протоколе AX.25. Для наглядности нарисуем блок-схему которая выглядит так:
\|/
|
.------. .------. .---------------------.
| FT60 |---| TNC2 |---| COM1---Linux(AX.25) | <--- beacon, listen, call, mheard
'------' '------' '---------------------'
Уже сейчас, без использования дополнительных программ, мы можем передавать маяки, мониторить частоту, соединяться с другими пакетными станциями, собирать статистику. Это базовые функции AX.25. Теперь рассмотрим, на конкретных примерах, варианты подключения различных программ к имеющейся конфигурации:
APRX
Чтобы через созданный порт могла работать программа APRS шлюза APRX, нужно
в файле конфигурации /etc/aprx.conf указать позывной
порта и запустить APRS-маяк, а обычный маяк отключить.
/etc/aprx.conf <interface> ax25-device UA6HJQ-1 <--- позывной указанный в /etc/ax25/axports tx-ok true </interface> <beacon> beaconmode both cycle-size 30m beacon symbol "I&" lat "4502.19N" lon "04158.35E" comment "Rx-Tx-iGate from Stavropol" </beacon>В строке ax25-device нужно указать позывной присвоенный порту в файле /etc/ax25/axports в нашем случае это UA6HJQ-10. Так программа APRX поймёт что требуется работать через этот порт. Для автоматического запуска APRX из скрипта, конец файла /etc/rc.d/rc.ax25 нужно дописать:
/etc/rc.d/rc.ax25 echo "aprx runing..." cd /sbin ./aprxПрограмма APRX, по умолчанию, запускается как демон и не занимает терминал, да там и смотреть не на что. Можно отметить, что APRX может работать напрямую с COM-портом и без AX.25 в Linux. В этом случае поддерживаются любые TNC имеющие KISS режим или TNC2 совместимые модели с прошивкой 6PACK или SMACK.
XNET
Чтобы через созданный порт мог работать роутер XNET, нужно дописать указанные
строки в указанные файлы. Работа XNET напрямую с AX.25 не предусмотрена,
поэтому, сначала создаём виртуальный порт (ptyp0-ttyp0) между AX.25 и XNET,
а затем запускаем сам XNET в 7-ом терминале. От туда с ним можно работать.
/etc/rc.d/rc.ax25 net2kiss -i sp0 /dev/ptyp0 & sleep 1 echo "(X)NET on tty7" cd /usr/xnet ./linuxsnet < /dev/tty7 > /dev/tty7 & /usr/xnet/AUTOEXEC.NET attach sdev0 kiss 0 1 9600 /dev/ttyp0 po 0 name 144625khz
Нужно отметить, что XNET можеть работать напрямую с COM-портом и без поддержки AX.25 со стороны Linux, но в этом случае выбор 'железа' ограничен TNC2 совместимыми моделями с прошивкой TRKISS. Кстати, работает он с ними очень хорошо!
OpenBCM
Делать соединение между портом и BBS нет смысла (хотя и возможно), гораздо
практичнее соединить их через XNET, так BBS получит возможность вести форвардинг
как через радиоканал, так и через FlexNet, NETROM, INP3, AMPR сети,
а пользователи этих сетей, получать доступ к нему. Поэтому создаём ещё один
виртуальный порт в XNET для BBS. Работа роутера XNET в связке с BBS OpenBCM,
это оптимальный вариант, они гармонично дополняют друг друга.
/usr/xnet/AUTOEXEC.NET attach sdev1 kiss 1 1 38400 /dev/ptyp2 # link to baybox po 1 name local mailbox po 1 baud 38400 po 1 duplex 255 po 1 per 200 po 1 txd 0 route local add 1 ua6hjq-8 nd BCM /usr/bcm/init.l2 dcall ua6hjq-2 ; xnet call monitor 4 mselect 0 mcalls -0 ; assign kiss mode 38400 device /dev/ttyp2 /etc/rc.d/rc.ax25 echo "BayCom-Mailbox on tty8" cd /usr/bcm ./bcm144k < /dev/tty8 > /dev/tty8 &OpenBCM должен запускаться после (его строки стоят ниже) XNET. В 8-ой консоли вы будете видеть что он делает, в режиме реального времени. Это удобно и нужно для отладки его работы. ББС должен работать под постоянным контролем SysOp, как и любая почтовая система он требует обслуживания.
NODE и AWZNODE
Эти программы выполняют простые узловые функции, на мой взгляд они устарели,
роутер XNET может их полностью заменить. Поэтому настройку и конфигурацию
NODE и AWZNODE здесь я рассматривать не буду.
Полезные ссылки:
hamcmw.qrz.ru/pr/ - большой раздел о пакетной связи и aprs
APRX ,
OpenBCM , XNET ,
AWZnode
Игорь UA6HJQ