R O S
ОСЕНЬ 2017ROS - режим радиолюбительской связи, разработанный для условий с низким уровнем сигнал/шум. ROS был разработан Хосе Альберто Нието Рос EA5HVK.
ROS реализует комбинации: FHSS (Frequency Hopping Spread Spectrum), DSSS (Direct Sequence Spread Spectrum), 2G (Second Generation) и CDMA (Code Division Multiple Access). Модем c непрерывным одиночным тоном, схема модуляции 144 MFSK, ROS может работать с нелинейным усилителем, класса С/D/E.
Уникальность технологии 2G, заключается во множественном одновременном доступе к одному каналу, аналогично мобильным телефонам. На одном частотном канале могут работать несколько радиостанций и проводить QSO, не мешая друг другу. Поэтому менять частоты в пределах диапазона, нет необходимости.
ROS обеспечивает эффективное использование пропускной способности канала и скорости передачи данных, при минимальной мощности и является надежным видом радиосвязи, который подходит для QRP DX, там где другие режимы передачи данных (RTTY, BPSK, MT63, OLIVIA) не могут обеспечить связь.
Минимальный уровень декодируемого сигнала, по заявлению автора: ROS16: -23dBs, ROS8: -26dBs, ROS4: -28dBs даже близко не соответствует реалиям, на самом деле ROS4 -15...-16 dBs, ROS8 -14дб, ROS16 -12дб.
UA6HJQ: 'Испытание ROS v7.4.0 на стенде и сравнение c FLDigi, показали что ROS4 (-16дб) можно сравнивать с MFSK4, THOR4, CONTESTIA, DOMINO.'
В трансивере вы не должны ограничивать полосу передачи уже 2300Гц и применять узкие фильтры в приёмнике. Благодаря широкому спектру, ROS хорошо работает на любых частотах, от длинных волн до УКВ. ROS устойчив к замираниям, несущим и эффекту Доплера.
Знакомство с программой
Скачайте свежую версию с сайта автора. Распакуйте архив и запустите установку.
Эти действия стандартные и не отличаются от установки других программ.
После установки, на 'рабочем столе' появится ярлык для запуска программы ROS.
После запуска, идём в закладку Configure --> Operator и заполняем поля. Затем проверяем установки в закладках Rig и Sound Card.
Проведённые QSO можно сохранять в файле ADIF или сразу отправлять на сервисы eQSL, HAMLOG, HRDlog.
Откройте меню Frequencies и выберите частоту. Важно встать именно на указанную частоту. В отличии от других цифровых видов, здесь нет необходимости на кого-то настраиваться, все станции работают одновременно на одной частоте и не мешают друг другу.
Программа имеет три режима 16-8-4 это скорость передачи в бодах. Чем медленнее - тем пробивнее. В ROS можно проводить QSO на разных скоростях. Если у вас 5Вт, передавайте в ROS4, а у вашего корреспондента 50Вт, он может передавать в ROS8, например.
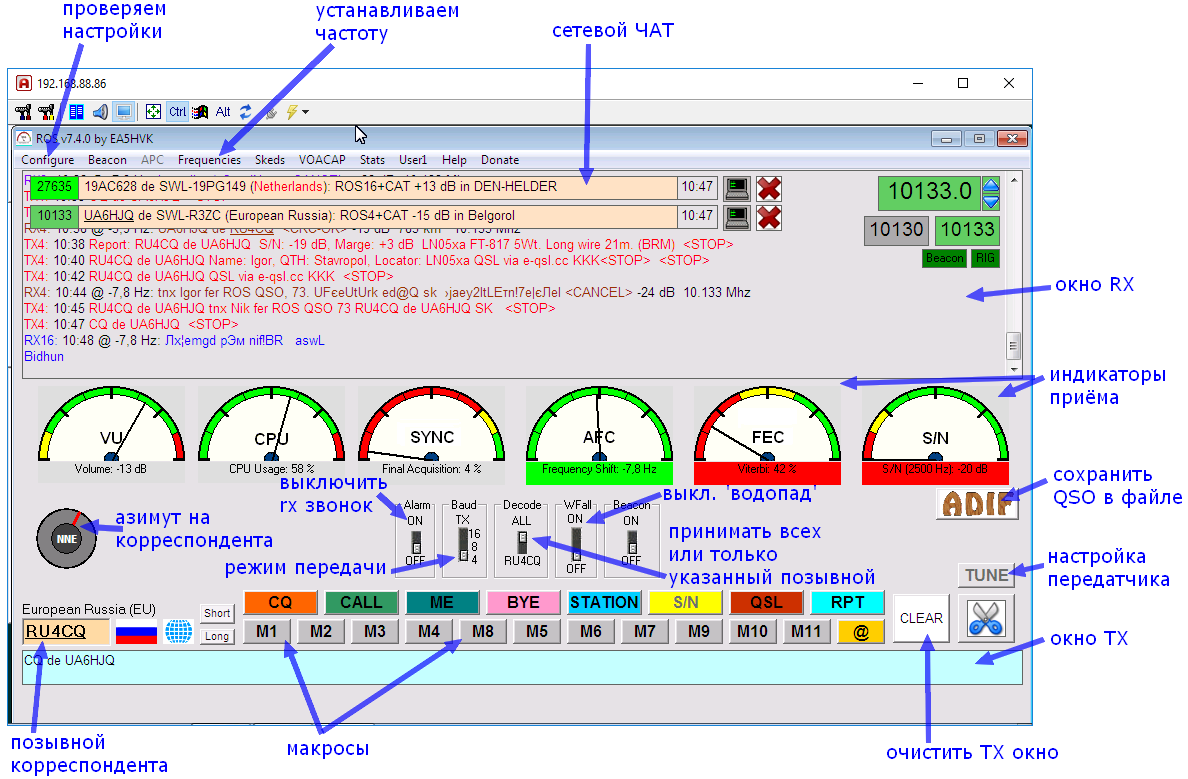
Как видите на картинке выше, интерфейс программы очень простой. Если компьютер подключен к интернету, будет работать ЧАТ, где можно наблюдать кто и на каких частотах передаёт, а также будет передаваться статистика на pskreporter.
Проведение QSO в ROS аналогично RTTY или BPSK, но особенность в том, что если вы слышите другие сигналы на частоте, можете передавать в любой момент вы им мешать не будете, впрочем как и они вам, в этом суть метода CDMA применяемого в ROS.
В ROS нет временных интервалов, вы можете передавать в любой момент времени. Жесткая синхронизация часов компьютера, также не требуется!
Стрелочные индикаторы в программе очень информативные, всего их 6. Когда приём идёт без ошибок четыре правых индикатора подсвечиваются зелёным цветом (как на картинке ниже). Это означает 100% приём.
Самый левый индикатор, показывает уровень НЧ-сигнала с трансивера, следующий индикатор - загрузка процессора. На слабых компьютерах, чтобы уменьшить нагрузку на CPU, выключайте 'водопад' вы всё равно стоите на одной частоте. хи.

Режим маяка интересен тем что может передавать CQ ... через указанные интервалы и может сам отвечать на запросы других станций. Плюс к этому, принятые позывные скидываются на pskreporter.
Чтобы сделать настройки маяка, зайдите в меню Beacon, установите интервал и текст, нажмите OK. На панели под индикатором AFC, включите маяк.
Интересная особенность программы ROS, в том что среди любительских участков присутствует и частота СВ диапазона 27МГц (27.635 USB).
Обратите внимание!
Предыдущая версия программы ROS несовместима с последней!
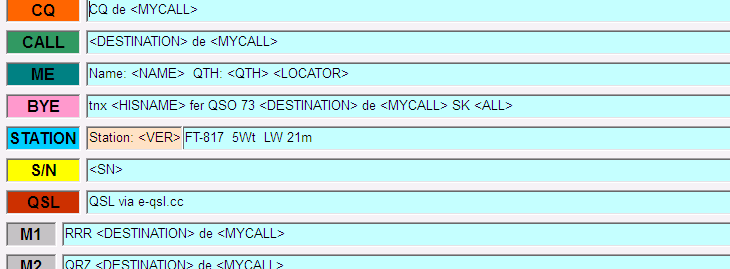
Макросы в ROS имеют свои особенности. Например, передача KKK или PSE K в ROS бессмысленна и только занимает время, ваш корреспондент и так чётко видит когда вы закончили передачу.
Предлагаю укоротить стандартные макросы, как показано на картинке выше, чтобы не затягивать QSO в режиме ROS4.
В макросе QSL, не передавайте все возможные варианты отправить вам qsl. Выберите один, наиболее предпочтительный для вас.
Информацию о позывном, с которым вы работаете, программа ищет на qrz.com автоматически и подставляет в макросы. Поэтому, передавать своё имя и город во время QSO, нет необходимости.
Состыковать LogHX3 с ROS можно через ADIF-файл. ROS заносит в него связи когда вы нажимаете кнопку EXPORT QSO. В LogHX3 заходите в Файл --> Экспорт --> adif формат и добавляете связи в журнал.
Типовые ошибки:
• Ответ на ваш вызов в ROS4 длится примерно 30 секунд, делайте паузу после каждой передачи!
• Если вы зовёте в ROS16 ответить вам могут в ROS4 или ROS8, поэтому если вы не слышите звук, это не значит что вам не отвечают. Ждите 20-30 секунд перед следующим вызовом!
• Не ставьте 'PSE K' в конце каждой передачи, в ROS и так видно когда вы перешли на приём.
• Чтобы принимать только вашего корреспондента, передвиньте DECODE вниз.
• После начала передачи макросов, сразу жмите на STOP, тогда передача сама закончится, когда будет передан весь текст.
Недостатки ROS
• Судя по всему автор забросил проект.
• Пропустив начало передачи (из-за замирания или помехи), программа не сможет декодировать оставшуюся часть. Нужно корреспондента просить повторить передачу. Учитывайте это при проведении ROS QSO.
• Нет возможности использовать узкие фильтры, если в JT-модах сигнал можно 'вытащить' из шумов, в ROS так не получится.
• Режим кодового разделения станций (CDMA) не отлажен до конца.
• Низкое соотношение S/N (максимум -15дб в ROS8) хотелось бы больше.
• Иногда программа сбоит.
Из трёх режимов, только ROS4 интересен для тестов, он выигрывает у PSK31, RTTY, OLIVIA, HELL, но проигрывает CMSK8, DOMINO micro, THOR micro, MFSK4 и JT-модам. ROS интересен именно реализацией протокола CDMA. Видно что автор EA5HVK настоящий исследователь, которому важна не форма, а содержание. Пожелаем ему удачи!
Ссылки: EA5HVK software Wiki pskreporter forum.qrz.ru
UA6HJQ